Hello all,
1.I am trying to research about floating wind turbine ITI Barge structure RAO(response amplitude operator) Surge ,heave ,pitch regular or jonswap wave conditions
but I don’t find clear imformation about that .
do u provide imformation to me?
2.there are 6 different floating wind turbine ,where I can find barge and TLP 6x6 linearized restoring matrix ?
thank u
Dear Steven,
The RAOs of the ITI Energy Barge are documented in Section 4.3.1 of the following report: nrel.gov/docs/fy08osti/41958.pdf.
What linearized restoring matrix are you referring to–from moorings, buoyancy/hydrostatics, body weight? All of these physics are included in the corresponding FAST models we’ve made available for these floating wind systems. Some of these restoring terms are specified explicitly and others can be derived from the properties specified.
Best regards,
hi
Jason Jonkman
1.Umm ,In other words, i want to know why there are mooring matrix present about SPAR and semisunmarine on NREL article and then TLP and ITIT Barge seem to don’t present?
2.i have read report before u sent that but i am still confused what kind of wave condition (wave height, period,regular and irregular)in Section 4.3.1?
i am new user and trying to read report about floating wind turbine informations
thank u
Dear Steven,
The linearized stiffness matrix of the mooring system for the ITI Energy barge is documented in my Oct 11, 2016 post in the following forum topic: Generate new mode shapes for the 5MW ITIBarge4 wind turbine - #7 by Xin.Tong.
I’m not aware of any publication where the linearized stiffness matrix of the mooring/tendon system for the MIT/NREL TLP is documented. However, the MAP++ model for this system is available in the FAST archive (see file NRELOffshrBsline5MW_MIT_NREL_TLP_MAP.dat). While I have not use the Python wrapper for MAP++, my understanding from the online documentation is that this wrapper can be used to derive the linearized stiffness matrix: map-plus-plus.readthedocs.io/en/ … ample.html.
An RAO is a linear effect, and so, should be independent of the sea state. But the approach used to derive the RAO (including the sea state conditions) is documented in that Section - i.e. regular waves of different frequencies with a wave height of 2 meters. Since that report was published, we now recommend deriving RAOs using irregular white-noise wave excitation, as documented in the following publication: nrel.gov/docs/fy13osti/58098.pdf.
Best regards,
Hi
Jason Jonkman, Ph.D.
1.where I can see file NRELOffshrBsline5MW_MIT_NREL_TLP_MAP.dat?
2.do u present tension leg platform 6x6 linearized stiffness matrix to me ?
3.On the Dynamics Modeling and Loads Analysis of an Offshore Floating Wind Turbine report, in section 4.3.1 what does mean waves were unit amplitude?
what is wave condition in in section 4.3.1?
thank u
Dear Steven,
Here are my answers to your questions:
-
Are you using FAST? NRELOffshrBsline5MW_MIT_NREL_TLP_MAP.dat is one of the files distributed with the archive. If you are using FAST v8, it is in the CertTest\5MW_Baseline directory, or if you are using OpenFAST, it is in the glue-codes\fast\5MW_TLP_DLL_WTurb_WavesIrr_WavesMulti directory of the r-test archive.
-
NREL has not published the linearized stiffness matrix of the mooring/tendon system for the MIT/NREL TLP and I have not calculated it myself. As I said, you can calculate it yourself using NRELOffshrBsline5MW_MIT_NREL_TLP_MAP.dat and the Python wrapper to MAP++
-
“Waves with unit amplitude” means that the wave amplitude is 1 m and the wave height is 2 m.
Best regards,
Hi
Jason Jonkman, Ph.D.
1.i use wecsim to caculte floating wind turbine condition, so i need 6x6 matrix to caculte and then campare with my code .if i dont have 6x6 matrix and then i can’t verify my code.
2.what does mean a “peak-to-peak height of 2 m” in section 4.3.1?
it mean wave heigh is 2 m?
anyway
thank u again
Dear Steven,
I’ve already told you how you can generate the 6x6 matrix.
Yes.
Best regards,
Hi
Jason Jonkman, Ph.D.
i still have questuons
in section4.3.1 “regular periodic waves of unit amplitude”
it mean that regular wave?
thank u
Dear Steven,
Yes.
Best regards,
Hi
Jason Jonkman, Ph.D.
when i caculte RAO and have to input inertia and gavity
i campare two case
A: gravity=(0,0,89.92) inertia =(4,229,000,000 4,229,000,000 164,200,000)
B:gravity=(0,0,-78.61) inertia =(2.20E10 2.20E10 1.68E8)
1.why RAO position A Is higer than B?
2.the gravity and inertia which one have an impact on RAO?
3.What are viscous force , viscous drag force and viscous damping force relation on RAO?
4.Capmare two case RAO, A ballast is heavier than B ,others parameters are same
why are there phase angle about RAO ?
Thank u
Dear Steven,
In general, the pitch restoring of a floating system depends on the restoring from buoyancy (waterplane area, displaced volume, and center of buoyancy), the full-system mass and center of mass, and the restoring from the station-keeping system. The RAOs in various directions further depend on the wave excitation, added mass, radiation damping, viscous drag, full-system inertia, etc.
Raising the center of mass higher will reduce the pitch restoring, but depending the system configuration–and the relative contribution between mass, buoyancy, and mooring restoring–raising the center of mass may have a large or small impact on the RAOs.
The tools available to you (e.g. FAST from NREL, WAMIT, etc.) can be used to answer your specific questions.
Best regards,
HI
Jason.Jonkman
are there any about without connect mooring floating wind turbine response amplitude operator REPOTER?
because i analysis about without mooring floating wind turbine(TLP) the result is not good
I cant find the result of peak(amplitude operator).
thank u
Dear Steven,
I’m sorry, but I don’t really understand what you asking.
Best regards,
Hi Jason.Jonkman
sorry,
there are any about floating wind turbine RAO on without mooring conditions paper?
because i analysis floating wind turbine(TLP) RAO on without mooring conditions .
the result is not good
I cant find the result of peak(response amplitude operator).
Dear Steven,
I’m not familiar with any papers showing the RAOs of floating wind systems without moorings, but such an analysis should not be difficult.
A TLP or taut-leg floating wind system would require the mooring to maintain hydrostatic stability. A catenary system (e.g. for a spar buoy, semi-submersible, or barge) uses the mooring system only for station keeping. So, you could eliminate the catenary mooring system from any of the models without loss of hydrostatic stability, but of course, the floating wind system will drift as a result e.g. of aerodynamic loads applied.
Best regards,
hi Jason.Jonkman
the TLP wind turbine mooring system is Taut-leg type and the Taut-leg mooring system
it is diffenet from A catenary mooring system
the TLP wind turbine need to Taut-leg mooring(Very limited horizontal movement ) system to maintain stability.
so …I think I cant eliminate Taut-leg mooring system when I simulate TLP wind turbine.
When I were eliminate Taut-leg mooring system the TLP wind turbine will not stability , not maintain hydrostatic stability and Overturned.
because of these result ,i cant find TLP floating wind turbine without mooring system RAO conditions
do u agree with me?
thank u
Dear Steven,
Yes, I agree.
Best regards,
Dear Jason
I was trying to compute the RAOs of ITI Barge using whitenoise wave spectrum without wind, then I found that the pitch RAO got unusually large in its peak frequency(as shown in figure1). However, after I add steady wind of 8m/s to the same wave condition, the pitch RAO becomes about 10% of the value without wind(figure 2), and this value seems normal, was it because the increase of aerodynamic damping reduces the peak of pitch RAO?
Does the simulation results seem right to you? I also attached the HydroDyn input file below.

Figure 1
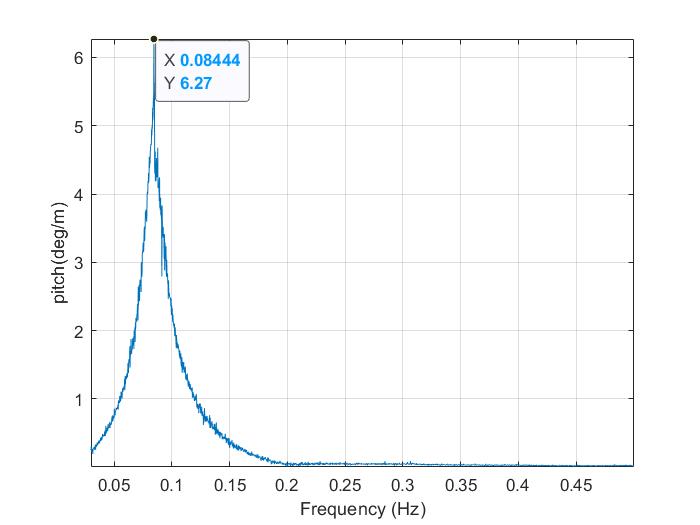
Figure 2


Thanks a lot!
Chen Gu