Dear Dr. Jonkman,
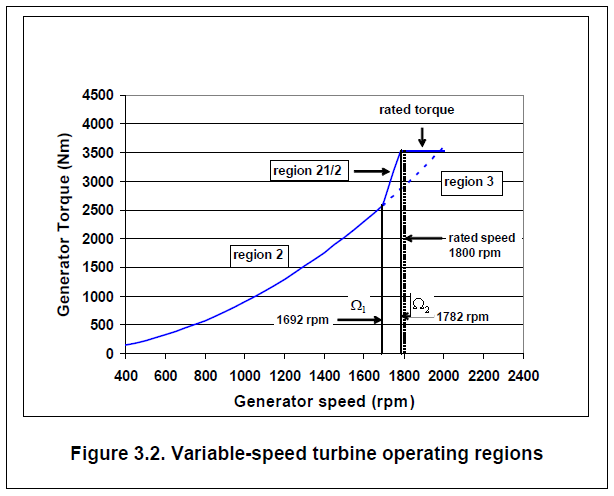
One document in Fast 7 (A wind turbine with 600KW) explains that to have the maximum generator torque in region 3, we should have a fixed generator torque like this:
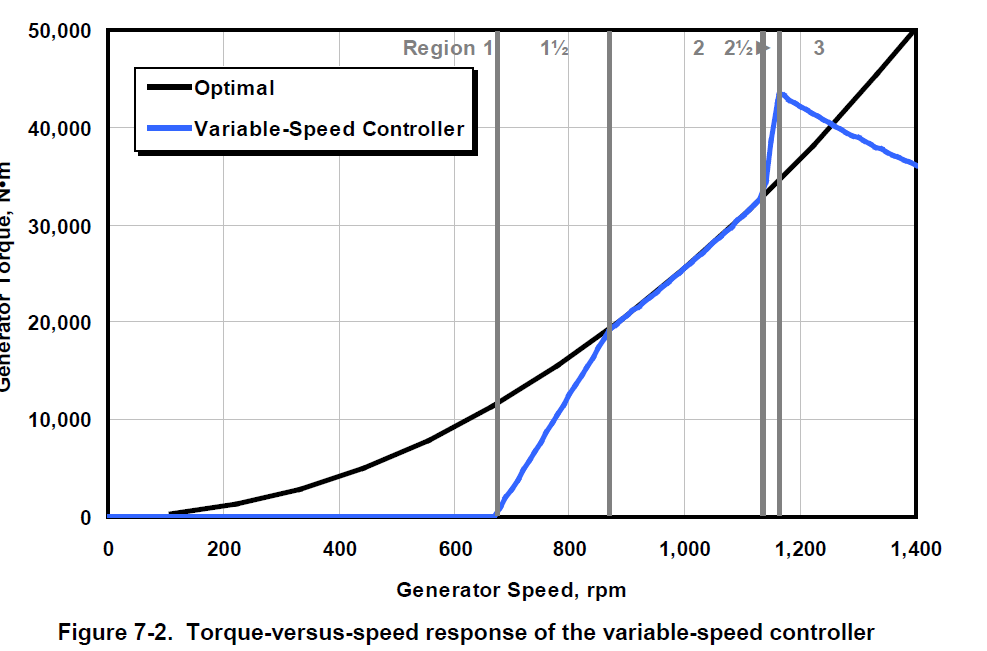
While, in another document related to 5MW for offshore wind turbines, the maximum generator torque in region 3 is decreasing. The below picture shows this:
May I know what is the underlying reason behind this difference?
Thanks
Best Regards,
Sina
Dear Sina,
There are two torque strategies in Region 3 (above rated): constant torque or constant power. In the former, the generator torque is held constant regardless of speed variations, which means the generator power (equaling torque times speed times efficiency loss) is variable. In the latter, the generator torque is inversely proportional to the speed variations, which means the generator power is constant. In the latter, the pitch controller must work a bit harder to regulate generator speed (to counteract the generator torque variations).
Best regards,
Dear Dr. Jonkman,
Thanks for clarifying the issue. If the pitch controller must work harder, may I know why the latter method (constant power) is used? In other words, what are the pros and cons of each approach?
Thanks
Best Regards,
Sina
Dear Sina,
With the constant power strategy, the generator torque varies and the pitch-control system must work a bit harder, but the generator power is constant. With the constant torque strategy, the pitch-control system does not have to work as hard, but the generator power is variable, which means the generator is overloaded for periods of time. Either way, the control strategy must be considered in the detailed design of the turbine components.
Best regards,
Dear Dr. Jonkman,
Thanks again for clarifying the issue. I got these results:
My question is that, are those figures are correct? If they are not, what is the reason? because my figures in region 3 are different from the above figures I placed!
Thanks
Best Regards,
Sina
Dear Sina,
No, these do not look correct e.g. I don’t see any 1.5 or 2.5 regions in your torque-speed curve. How were these curves made?
Best regards,
Hello jason,
I am working on Krogmann 15/50 Wind turbine. With Power of 50kW and Generator speed of 1500 rpm. So i have calculated Generator Torque of 318.31 N-m. I am trying to build Torque controller. i am confused about the omega1 and omega2 values for my system and how do i achieve Variable-speed regions. As attached in picture do i have to suppose my omega1 and omega2 values. Will my rated Torque be 318.31?
Thank you
best regards
Muddassir Nawaz

Dear Muddassir,
I would guess your rated generator torque would be more than 318.31 Nm because normally the electrical power output is less than the mechanical power output due to electrical efficiency losses.
I’m not sure what you mean by omega1 and omega2; are you referring to the transition generator speeds between regions 1 and 2 and between regions 2 and 3?
The constant (K) in the standard variable-speed torque control law (T=K*omega^2) can be calculated from the power coefficient surface…you’ll need to know the peak power coefficient and the tip-speed ratio where this peak occurs.
Best regards,
Dear jason,
Thank you for your response. Generator Torque calculated in my case as (GenTq = Rotor Torque/Gearbox ratio), here Rotor Torque = 7.3477kNm and Gearbox ratio = 23.23. So my GenTq = 316.5Nm. And Maximum Generator Power obtains at toruqe 318.31Nm. So i assume Rated Torque to be 318.31Nm.
The Omega1 and Omega2 are where region 21/2 starts and end. In “Advanced Control Design for Wind Turbines” Omega1 is 1691.98rpm and Omega2 is 1781.98rpm. These values are frictional or calculated? As i wanted to find out region 21/2 for Krogmann 15/50 wind turbine.
Thank you
best regards
Muddassir Nawaz
Dear Muddassir,
I believe the values of omega1 and omega2 you are reporting are appropriate for the CART2 wind turbine.
Best regards,
Hello jason,
Thank you for your response. Sorry you misunderstood, I am not reporting Omega1 and Omega2 values, just describing that Omega1 and Omega2 are where region 21/2 start and end. In my first Post on this page you asked what Omga1 and Omega2 are?
My Question still remains, Omega1 and Omega2 values are calculated or supposed?
I supposed values for , Omega1 = 1436.498rpm , Omega2 = 1461.963rpm. After running Simulation as shown in picture, i got rated Torque at 2700 rpm. This is incorrect. At GenSpeed 1500 rpm, i should have a constant Rated Torque.
[code]--------------------------------------------------------------------------------
------- FAST INPUT FILE --------------------------------------------------------
FAST certification Test #08: AOC 15/50 with many DOFs with fixed yaw error and steady wind.
Many parameters are pure fiction. Compatible with FAST v7.02.00.
---------------------- SIMULATION CONTROL --------------------------------------
False Echo - Echo input data to “echo.out” (flag)
1 ADAMSPrep - ADAMS preprocessor mode {1: Run FAST, 2: use FAST as a preprocessor to create an ADAMS model, 3: do both} (switch)
1 AnalMode - Analysis mode {1: Run a time-marching simulation, 2: create a periodic linearized model} (switch)
3 NumBl - Number of blades (-)
35.0 TMax - Total run time (s)
0.005 DT - Integration time step (s)
---------------------- TURBINE CONTROL -----------------------------------------
0 YCMode - Yaw control mode {0: none, 1: user-defined from routine UserYawCont, 2: user-defined from Simulink/Labview} (switch)
9999.9 TYCOn - Time to enable active yaw control (s) [unused when YCMode=0]
0 PCMode - Pitch control mode {0: none, 1: user-defined from routine PitchCntrl, 2: user-defined from Simulink/Labview} (switch)
9999.9 TPCOn - Time to enable active pitch control (s) [unused when PCMode=0]
1 VSContrl - Variable-speed control mode {0: none, 1: simple VS, 2: user-defined from routine UserVSCont, 3: user-defined from Simulink/Labview} (switch)
1461.963 VS_RtGnSp - Rated generator speed for simple variable-speed generator control (HSS side) (rpm) [used only when VSContrl=1]
318.31 VS_RtTq - Rated generator torque/constant generator torque in Region 3 for simple variable-speed generator control (HSS side) (N-m) [used only when VSContrl=1]
0.0001379 VS_Rgn2K - Generator torque constant in Region 2 for simple variable-speed generator control (HSS side) (N-m/rpm^2) [used only when VSContrl=1]
17.18 VS_SlPc - Rated generator slip percentage in Region 2 1/2 for simple variable-speed generator control (%) [used only when VSContrl=1]
1 GenModel - Generator model {1: simple, 2: Thevenin, 3: user-defined from routine UserGen} (switch) [used only when VSContrl=0]
True GenTiStr - Method to start the generator {T: timed using TimGenOn, F: generator speed using SpdGenOn} (flag)
True GenTiStp - Method to stop the generator {T: timed using TimGenOf, F: when generator power = 0} (flag)
9999.9 SpdGenOn - Generator speed to turn on the generator for a startup (HSS speed) (rpm) [used only when GenTiStr=False]
6.0 TimGenOn - Time to turn on the generator for a startup (s) [used only when GenTiStr=True]
25.0 TimGenOf - Time to turn off the generator (s) [used only when GenTiStp=True]
1 HSSBrMode - HSS brake model {1: simple, 2: user-defined from routine UserHSSBr, 3: user-defined from Labview} (switch)
9999.9 THSSBrDp - Time to initiate deployment of the HSS brake (s)
9999.9 TiDynBrk - Time to initiate deployment of the dynamic generator brake [CURRENTLY IGNORED] (s)
9999.9 TTpBrDp(1) - Time to initiate deployment of tip brake 1 (s)
9999.9 TTpBrDp(2) - Time to initiate deployment of tip brake 2 (s)
9999.9 TTpBrDp(3) - Time to initiate deployment of tip brake 3 (s) [unused for 2 blades]
9999.9 TBDepISp(1) - Deployment-initiation speed for the tip brake on blade 1 (rpm)
9999.9 TBDepISp(2) - Deployment-initiation speed for the tip brake on blade 2 (rpm)
9999.9 TBDepISp(3) - Deployment-initiation speed for the tip brake on blade 3 (rpm) [unused for 2 blades]
9999.9 TYawManS - Time to start override yaw maneuver and end standard yaw control (s)
9999.9 TYawManE - Time at which override yaw maneuver reaches final yaw angle (s)
0.0 NacYawF - Final yaw angle for yaw maneuvers (degrees)
9999.9 TPitManS(1) - Time to start override pitch maneuver for blade 1 and end standard pitch control (s)
9999.9 TPitManS(2) - Time to start override pitch maneuver for blade 2 and end standard pitch control (s)
9999.9 TPitManS(3) - Time to start override pitch maneuver for blade 3 and end standard pitch control (s) [unused for 2 blades]
9999.9 TPitManE(1) - Time at which override pitch maneuver for blade 1 reaches final pitch (s)
9999.9 TPitManE(2) - Time at which override pitch maneuver for blade 2 reaches final pitch (s)
9999.9 TPitManE(3) - Time at which override pitch maneuver for blade 3 reaches final pitch (s) [unused for 2 blades]
1.54 BlPitch(1) - Blade 1 initial pitch (degrees)
1.54 BlPitch(2) - Blade 2 initial pitch (degrees)
1.54 BlPitch(3) - Blade 3 initial pitch (degrees) [unused for 2 blades]
1.54 BlPitchF(1) - Blade 1 final pitch for pitch maneuvers (degrees)
1.54 BlPitchF(2) - Blade 2 final pitch for pitch maneuvers (degrees)
1.54 BlPitchF(3) - Blade 3 final pitch for pitch maneuvers (degrees) [unused for 2 blades]
---------------------- ENVIRONMENTAL CONDITIONS --------------------------------
9.80665 Gravity - Gravitational acceleration (m/s^2)
---------------------- FEATURE FLAGS -------------------------------------------
False FlapDOF1 - First flapwise blade mode DOF (flag)
False FlapDOF2 - Second flapwise blade mode DOF (flag)
False EdgeDOF - First edgewise blade mode DOF (flag)
False TeetDOF - Rotor-teeter DOF (flag) [unused for 3 blades]
True DrTrDOF - Drivetrain rotational-flexibility DOF (flag)
True GenDOF - Generator DOF (flag)
False YawDOF - Yaw DOF (flag)
False TwFADOF1 - First fore-aft tower bending-mode DOF (flag)
False TwFADOF2 - Second fore-aft tower bending-mode DOF (flag)
False TwSSDOF1 - First side-to-side tower bending-mode DOF (flag)
False TwSSDOF2 - Second side-to-side tower bending-mode DOF (flag)
True CompAero - Compute aerodynamic forces (flag)
False CompNoise - Compute aerodynamic noise (flag)
---------------------- INITIAL CONDITIONS --------------------------------------
0.0 OoPDefl - Initial out-of-plane blade-tip displacement (meters)
0.0 IPDefl - Initial in-plane blade-tip deflection (meters)
0.0 TeetDefl - Initial or fixed teeter angle (degrees) [unused for 3 blades]
0.0 Azimuth - Initial azimuth angle for blade 1 (degrees)
64.5 RotSpeed - Initial or fixed rotor speed (rpm)
0.0 NacYaw - Initial or fixed nacelle-yaw angle (degrees)
0.0 TTDspFA - Initial fore-aft tower-top displacement (meters)
0.0 TTDspSS - Initial side-to-side tower-top displacement (meters)
---------------------- TURBINE CONFIGURATION -----------------------------------
7.490 TipRad - The distance from the rotor apex to the blade tip (meters)
0.230 HubRad - The distance from the rotor apex to the blade root (meters)
1 PSpnElN - Number of the innermost blade element which is still part of the pitchable portion of the blade for partial-span pitch control [1 to BldNodes] [CURRENTLY IGNORED] (-)
0.0 UndSling - Undersling length [distance from teeter pin to the rotor apex] (meters) [unused for 3 blades]
0.0 HubCM - Distance from rotor apex to hub mass [positive downwind] (meters)
1.341 OverHang - Distance from yaw axis to rotor apex [3 blades] or teeter pin [2 blades] (meters)
0.0 NacCMxn - Downwind distance from the tower-top to the nacelle CM (meters)
0.0 NacCMyn - Lateral distance from the tower-top to the nacelle CM (meters)
0.6 NacCMzn - Vertical distance from the tower-top to the nacelle CM (meters)
30 TowerHt - Height of tower above ground level [onshore] or MSL [offshore] (meters)
0.61 Twr2Shft - Vertical distance from the tower-top to the rotor shaft (meters)
0.0 TwrRBHt - Tower rigid base height (meters)
0.0 ShftTilt - Rotor shaft tilt angle (degrees)
0.0 Delta3 - Delta-3 angle for teetering rotors (degrees) [unused for 3 blades]
6.0 PreCone(1) - Blade 1 cone angle (degrees)
6.0 PreCone(2) - Blade 2 cone angle (degrees)
6.0 PreCone(3) - Blade 3 cone angle (degrees) [unused for 2 blades]
0.17 AzimB1Up - Azimuth value to use for I/O when blade 1 points up (degrees)
---------------------- MASS AND INERTIA ----------------------------------------
0.0 YawBrMass - Yaw bearing mass (kg)
2440.25 NacMass - Nacelle mass (kg)
294.4 HubMass - Hub mass (kg)
5.9 TipMass(1) - Tip-brake mass, blade 1 (kg)
5.9 TipMass(2) - Tip-brake mass, blade 2 (kg)
5.9 TipMass(3) - Tip-brake mass, blade 3 (kg) [unused for 2 blades]
417.106 NacYIner - Nacelle inertia about yaw axis (kg m^2)
10.0 GenIner - Generator inertia about HSS (kg m^2)
64.0 HubIner - Hub inertia about rotor axis [3 blades] or teeter axis [2 blades] (kg m^2)
---------------------- DRIVETRAIN ----------------------------------------------
98.0 GBoxEff - Gearbox efficiency (%)
92.8 GenEff - Generator efficiency [ignored by the Thevenin and user-defined generator models] (%)
23.23 GBRatio - Gearbox ratio (-)
False GBRevers - Gearbox reversal {T: if rotor and generator rotate in opposite directions} (flag)
9999.9 HSSBrTqF - Fully deployed HSS-brake torque (N-m)
9999.9 HSSBrDt - Time for HSS-brake to reach full deployment once initiated (sec) [used only when HSSBrMode=1]
“unused” DynBrkFi - File containing a mech-gen-torque vs HSS-speed curve for a dynamic brake [CURRENTLY IGNORED] (quoted string)
1.76E5 DTTorSpr - Drivetrain torsional spring (N-m/rad)
1.0E5 DTTorDmp - Drivetrain torsional damper (N-m/(rad/s))
---------------------- SIMPLE INDUCTION GENERATOR ------------------------------ Crude approximation of torque/speed curve.
2.222 SIG_SlPc - Rated generator slip percentage (%) [used only when VSContrl=0 and GenModel=1]
1500.0 SIG_SySp - Synchronous (zero-torque) generator speed (rpm) [used only when VSContrl=0 and GenModel=1]
318.31 SIG_RtTq - Rated torque (N-m) [used only when VSContrl=0 and GenModel=1]
1.75 SIG_PORt - Pull-out ratio (Tpullout/Trated) (-) [used only when VSContrl=0 and GenModel=1]
---------------------- THEVENIN-EQUIVALENT INDUCTION GENERATOR -----------------
60.0 TEC_Freq - Line frequency [50 or 60] (Hz) [used only when VSContrl=0 and GenModel=2]
4 TEC_NPol - Number of poles [even integer > 0] (-) [used only when VSContrl=0 and GenModel=2]
4.92E-02 TEC_SRes - Stator resistance (ohms) [used only when VSContrl=0 and GenModel=2]
5.34E-04 TEC_RRes - Rotor resistance (ohms) [used only when VSContrl=0 and GenModel=2]
480.0 TEC_VLL - Line-to-line RMS voltage (volts) [used only when VSContrl=0 and GenModel=2]
1.00E-04 TEC_SLR - Stator leakage reactance (ohms) [used only when VSContrl=0 and GenModel=2]
1.00E-04 TEC_RLR - Rotor leakage reactance (ohms) [used only when VSContrl=0 and GenModel=2]
4.49E-03 TEC_MR - Magnetizing reactance (ohms) [used only when VSContrl=0 and GenModel=2]
---------------------- PLATFORM ------------------------------------------------
0 PtfmModel - Platform model {0: none, 1: onshore, 2: fixed bottom offshore, 3: floating offshore} (switch)
“unused” PtfmFile - Name of file containing platform properties (quoted string) [unused when PtfmModel=0]
---------------------- TOWER ---------------------------------------------------
11 TwrNodes - Number of tower nodes used for analysis (-)
“AOC_Tower.dat” TwrFile - Name of file containing tower properties (quoted string)
---------------------- NACELLE-YAW ---------------------------------------------
0.0 YawSpr - Nacelle-yaw spring constant (N-m/rad)
0.0 YawDamp - Nacelle-yaw damping constant (N-m/(rad/s))
0.0 YawNeut - Neutral yaw position–yaw spring force is zero at this yaw (degrees)
---------------------- FURLING -------------------------------------------------
False Furling - Read in additional model properties for furling turbine (flag)
“unused” FurlFile - Name of file containing furling properties (quoted string) [unused when Furling=False]
---------------------- ROTOR-TEETER --------------------------------------------
0 TeetMod - Rotor-teeter spring/damper model {0: none, 1: standard, 2: user-defined from routine UserTeet} (switch) [unused for 3 blades]
0.0 TeetDmpP - Rotor-teeter damper position (degrees) [used only for 2 blades and when TeetMod=1]
0.0 TeetDmp - Rotor-teeter damping constant (N-m/(rad/s)) [used only for 2 blades and when TeetMod=1]
0.0 TeetCDmp - Rotor-teeter rate-independent Coulomb-damping moment (N-m) [used only for 2 blades and when TeetMod=1]
0.0 TeetSStP - Rotor-teeter soft-stop position (degrees) [used only for 2 blades and when TeetMod=1]
0.0 TeetHStP - Rotor-teeter hard-stop position (degrees) [used only for 2 blades and when TeetMod=1]
0.0 TeetSSSp - Rotor-teeter soft-stop linear-spring constant (N-m/rad) [used only for 2 blades and when TeetMod=1]
0.0 TeetHSSp - Rotor-teeter hard-stop linear-spring constant (N-m/rad) [used only for 2 blades and when TeetMod=1]
---------------------- TIP-BRAKE -----------------------------------------------
0.0 TBDrConN - Tip-brake drag constant during normal operation, CdArea (m^2)
0.0 TBDrConD - Tip-brake drag constant during fully-deployed operation, CdArea (m^2)
0.0 TpBrDT - Time for tip-brake to reach full deployment once released (sec)
---------------------- BLADE ---------------------------------------------------
“AOC_Blade.dat” BldFile(1) - Name of file containing properties for blade 1 (quoted string)
“AOC_Blade.dat” BldFile(2) - Name of file containing properties for blade 2 (quoted string)
“AOC_Blade.dat” BldFile(3) - Name of file containing properties for blade 3 (quoted string) [unused for 2 blades]
---------------------- AERODYN -------------------------------------------------
“aerodyn1.ipt” ADFile - Name of file containing AeroDyn input parameters (quoted string)
---------------------- NOISE ---------------------------------------------------
“unused” NoiseFile - Name of file containing aerodynamic noise input parameters (quoted string) [used only when CompNoise=True]
---------------------- ADAMS ---------------------------------------------------
“AOC_ADAMS.dat” ADAMSFile - Name of file containing ADAMS-specific input parameters (quoted string) [unused when ADAMSPrep=1]
---------------------- LINEARIZATION CONTROL -----------------------------------
“AOC_Linear.dat” LinFile - Name of file containing FAST linearization parameters (quoted string) [unused when AnalMode=1]
---------------------- OUTPUT --------------------------------------------------
True SumPrint - Print summary data to “.fsm” (flag)
1 OutFileFmt - Format for tabular (time-marching) output file(s) (1: text file [.out], 2: binary file [.outb], 3: both) (switch)
True TabDelim - Use tab delimiters in text tabular output file? (flag)
“ES10.3E2” OutFmt - Format used for text tabular output (except time). Resulting field should be 10 characters. (quoted string) [not checked for validity!]
5.0 TStart - Time to begin tabular output (s)
10 DecFact - Decimation factor for tabular output {1: output every time step} (-)
5.0 SttsTime - Amount of time between screen status messages (sec)
0.0 NcIMUxn - Downwind distance from the tower-top to the nacelle IMU (meters)
0.0 NcIMUyn - Lateral distance from the tower-top to the nacelle IMU (meters)
0.0 NcIMUzn - Vertical distance from the tower-top to the nacelle IMU (meters)
0.5 ShftGagL - Distance from rotor apex [3 blades] or teeter pin [2 blades] to shaft strain gages [positive for upwind rotors] (meters)
0 NTwGages - Number of tower nodes that have strain gages for output [0 to 9] (-)
0 TwrGagNd - List of tower nodes that have strain gages [1 to TwrNodes] (-) [unused if NTwGages=0]
5 NBlGages - Number of blade nodes that have strain gages for output [0 to 9] (-)
2,4,6,8,9 BldGagNd - List of blade nodes that have strain gages [1 to BldNodes] (-) [unused if NBlGages=0]
OutList - The next line(s) contains a list of output parameters. See OutList.xlsx for a listing of available output channels, (-)
“TotWindV” - Wind speed
“TipDxb3,TipDyb3” - Blade 3 flapwise and edgewise tip deflections
“TipRDxb3,TipRDyb3” - Blade 3 roll and pitch tip deflections
“Spn5ALxb1,Spn5ALyb1” - Blade 1 Gage #5 (Node 9) local flapwise and edgewise accelerations
“RotSpeed,LSSGagV,HSShftV” - Rotor, LSS (GBox side), and HSS speed
“RootFxb3,RootFyb3” - Blade 3 root flapwise and edgewise shear forces
“RootMEdg3,RootMFlp3” - Blade 3 root edgewise and flapwise bending moments
“Spn4MLxb1,Spn4MLyb1” - Blade 1 Gage #4 (Node 8) local edgewise and flapwise bending moments
“LSSGagFxs,LSSGagFys,LSSGagFzs” - Non-rotating LSS thrust and shear forces
“LSShftTq,HSShftTq,GenTq” - LSS, HSS, and generator torque
“LSShftPwr,HSShftPwr,GenPwr” - LSS, HSS, and generator power
END of FAST input file (the word “END” must appear in the first 3 columns of this last line).
[/code]
Can you please let me know what is going wrong in my case.
I would appreciate any help.
Thank you
Best regards
Muddassir Nawaz
Dear Muddassir,
I don’t know how to answer your question because I don’t know anything about the Krogmann 15/50 wind turbine. In general, you should set the values to match the properties of the actual wind turbine you are modeling.
Does this wind turbine have a variable speed torque controller? Does it operate with a region 2.5? How did you make your generator torque versus generator speed plot?
Best regards,
Hello Jason,
I checked Krogmann 15/50 deosn't have region 2.5 (it has four regions 1, 2, 3 ,4). but it has a torque controller. Can you tell me how to apply Wind as Input signal in FAST7 to check Wind turbine Performance(as i have my own wind calculation .wnd file). I tried with Test01_SIG.mdl {Since i don't have any idea how controller will look like without 2.5 region, as all document to controller on internet are related region 2.5. if you could link me to controller document, that will be helpful}. But How to apply wind as input? do i use "TotWindV" in simulink?
Thanks
best regards
Muddassir Nawaz
Dear Muddassir,
TotWindV is an output from the FAST S-Function in Simulink, not an input.
Instead, in FAST v7 (both with and without the Simulink interface), wind is specified via the WindFile input parameter in the AeroDyn v13 input file–see the old FAST v7 and AeroDyn related documentation for more information:
nwtc.nrel.gov/system/files/FAST.pdf
nwtc.nrel.gov/system/files/AeroDyn.pdf
nwtc.nrel.gov/system/files/User … erface.pdf
I’m not sure what you controller document you are asking for a link to.
Best regards,
Dear jason,
I am trying to get "GenPwr" with Torque controller
1 VSContrl - Variable-speed control mode {0: none, 1: simple VS, 2: user-defined from routine UserVSCont, 3: user-defined from Simulink/Labview} (switch)
1500 VS_RtGnSp - Rated generator speed for simple variable-speed generator control (HSS side) (rpm) [used only when VSContrl=1]
318.31 VS_RtTq - Rated generator torque/constant generator torque in Region 3 for simple variable-speed generator control (HSS side) (N-m) [used only when VSContrl=1]
0.0001414 VS_Rgn2K - Generator torque constant in Region 2 for simple variable-speed generator control (HSS side) (N-m/rpm^2) [used only when VSContrl=1]
9999.9e-9 VS_SlPc - Rated generator slip percentage in Region 2 1/2 for simple variable-speed generator control (%) [used only when VSContrl=1]
i followed Control section of FAST User’s guide, neglecting 21/2 region. But problem is, i am getting GenPwr around 80kW which should be 50kW.
My GBoxEff =98% , GenEff = 92.8% following [url]Resistant moment of the rotor and of the electric generator] if i calculate my GenPwr is around 45-50kW, but output show 80kW.
Also HSShfV goes to 2500 rpm and LSSGagV goes to 120 rpm {even though RotSpeed =64.5 rpm is mentioned in “initial Conditions”} Why is generator and rotor speed so high?
Thank you
best regards
Muddassir Nawaz
Dear Muddassir,
Your power is likely going so high because:
- the generator torque in your model is constant for speeds higher than rated speed (Region 3 control),
- the aerodynamic torque is higher than the rated generator torque, and
- you don’t have active blade-pitch control to reduce the aerodynamic torque at high winds to regulate the speed,
which means that the rotor will overspeed (and generator power will exceed rated) until the aerodynamic torque balances with the generator torque.
You’ll need another means of control to operate in Region 3 e.g. active blade pitch control.
Best regards,
Dear Jason,
If I am well understood, there are 2 methods to get generator torque, (considering the turbine working in region 3)
first, constant torque: fix it at its rated value;
second, constant power: get the generator torque by calculating T = P_rated/Omega;
And I’m working on the floating wind turbine control in region 3. The control objectives are keep rated power output and reduce the platform pitch motion. Currently, the generator torque was fixed at rated, the single control input is the collective blade pitch (CBP) angle.
My question is:
Is it possible to use generator torque as the second input? i.e. do not use the constant torque and the constant power strategy. Then, I will get two control inputs, it might improve the controller performance.
Best regards,
Cheng
Dear Cheng.Zhang.
Yes, what you propose has certainly been done before. Varying the torque in Region 3 can be effective to mitigate vibrations of the drivetrain-torsion and/or tower side-to-side modes.
Best regards,
Dear Jason,
Thank you!
I’m confused that,
1). Do a high vibration of the drivetrain-torsion means a high variation of the rotor speed?
2). In my opinion, performance is highly related to the control algorithm.
If I introduce additional control input (generator torque), the control is different from the one only have a single input (blade pitch angle). Recall that in my case, the objectives are to keep rated power output and to reduce the platform pitch motion. I can compare the performance of power and platform pitch motion of the two controllers.
As for the vibrations of the drivetrain-torsion and/or tower side-to-side modes, since they are not my control objectives, I can only check it rather than controlling it. Hence, why it is effective to mitigate vibrations of the drivetrain-torsion and/or tower side-to-side modes.
Best regards,
Cheng
Dear Cheng,
My previous comment simply stated that I have seen combined blade-pitch and generator-torque controllers, but that the generator-torque is often used to mitigate drivetrain-torsion and tower-side-to-side vibrations. I would not expect control of the generator torque to have a strong influence on platform-pitch, but it may be useful to regulate rotor speed and power in Region 3 if the pitch controller is also tasked with mitigating platform pitch. I would suggest reviewing the literature on these matters. The work of Namik and Stol from around 2010 comes to mind, but there are likely many others as well.
Best regards,