Hello,
I am working on modeling the impact of placing a Tuned Mass Damper in each of the three vertical columns of the OC4 Semisubmersible platform, but I am getting some results that are confusing to me and my colleagues.
When we vary the mass of the TMD, we get results that move further and further from being centered at zero degrees for the pitch motion.
I verified that my locations for the three TMD’s keep the center of mass at zero in the x and y directions, so I am still confused why we are getting these kinds of results. I would appreciate any feedback or suggestions anyone has.
Dear @Ryan.Okuda,
How much vertical displacement are you seeing in each of the three TMDs?
Depending on the vertical location of the natural position of the TMDs, the pitch restoring of the semisubmersible would be effected by the inclusion of the TMDs. Are you setting StC_Z_PreLd = “GRAVITY” or STC_Z_M * Gravity to ensure that the vertical TMD does not naturally want to displace downward too much?
Best regards,
@Jason.Jonkman ,
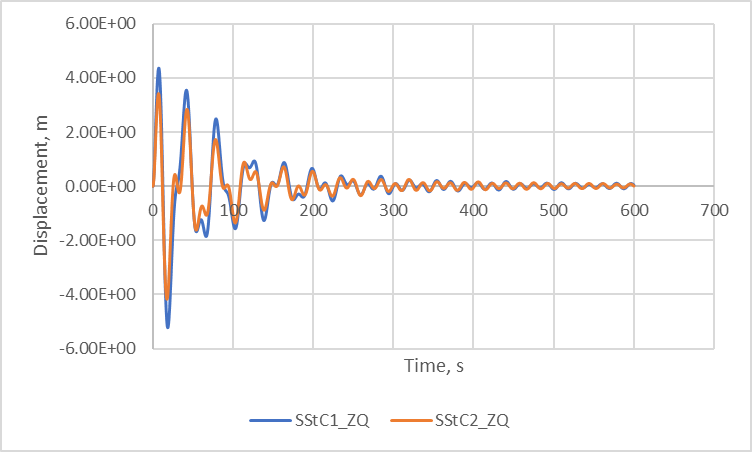
Thank you for responding so quickly. It looks like the maximum vertical displacement of the TMDs is approximately 4 meters. I plotted two of them here:
To answer your second question, the preload is set to “gravity”
I hope this information helps!
Thank you,
Ryan
Dear @Ryan.Okuda,
It looks like the mean displacement of the vertical TMDs is zero as expected. Where have you placed the at rest position of the TMDs?
When you add the TMDs and increase there mass, are you removing the same amount of mass from the semisubmersible structure or how are you offsetting the mass change in term of buoyancy?
Best regards,
Dear @Jason.Jonkman,
I originally placed the TMDs with the x and y positions placing them at the center of each of the 3 columns. For the z position, the case for the previous figures is with z=0, but I also tried moving the z position so that the COM in the Z direction would be the same as the case with no TMDs, and I get the same results.
Thank you,
Ryan
I did not offset the change in mass though, I will try running that case now and see what results I get.
1 Like
Dear @Jason.Jonkman,
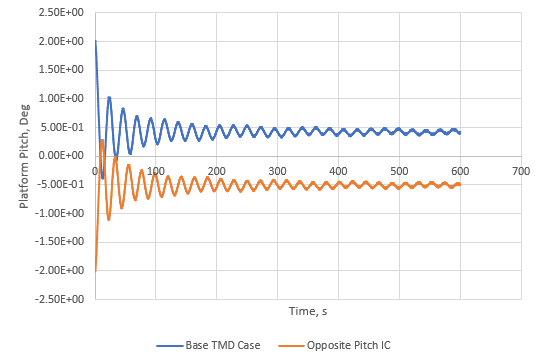
I just finished modifying both the platform mass and the ballast mass individually. For adjusting the platform mass, I just decreased the mass in the elastodyn file by the total mass of the TMDs. For the ballast water, I adjusted the amount of ballast in each of the columns to account for the difference in mass and here are the results for both:
It looks like the settling issue is still there and there are significantly different results for the oscillation of the whole system. Any suggestions?
Thank you,
Ryan
Dear @Ryan.Okuda,
When you add and remove mass, are you ensuring that the overall vertical center of mass location is unchanged? If not, the gravitational restoring in pitch (and roll) will change when you shift mass from the platform or ballast to the TMDs.
The biggest surprise to me in the results you show is that equilibrium pitch changes from negative (original) to positive (after shifting mass around). The original negative pitch comes from the overturning moment of the RNA, which tends to heal the FOWT slightly upwind in the absence of wind loading. Changing the vertical center of mass location will result in different levels of equilibrium pitch due to the change in gravitational restoring, but I would not expect it to switch signs, unless you are shifting the horizontal location of the center of mass as well, or if you have aerodynamic loads enabled.
Please note that simply ensuring that the overall mass and center of mass location are unchanged when shifting mass around does not guarantee that the rotational inertia is unchanged, which can impact the natural periods a bit.
Best regards,
Dear @Jason.Jonkman,
I have been making sure that I am keeping the center of mass location the same between each of the simulations. I agree that I was not expecting the equilibrium position to become positive. I am positive that the center of mass has not changed, especially in the z location. Also, I have aerodyn disabled right now.
Do you have any suggestions for what to try next?
Best,
Ryan
Dear @Ryan.Okuda,
I would double check that you are not shifting the x or z center of mass locations when shifting mass around, e.g., are you sure you’ve place the TMD masses in the correct locations?
To debug, I always find it helpful to simplify the model down a lot, e.g. in your case, eliminate all but the platform-pitch DOF, disable HydroDyn, disabling moorings, etc.
Best regards,
Dear @Jason.Jonkman,
Thank you for the suggestion. I am working on that now. I am curious if there is some way to output the COM location from OpenFAST. Right now I am calculating it by hand, and I wanted to double-check that what I am getting is the same as what OpenFAST is using.
Thank you,
Ryan
Dear @Ryan.Okuda,
OpenFAST does not compute the full-system center of mass directly. That said, an OpenFAST linearization analysis can be used to extract the 6x6 rigid-body mass matrix of a wind turbine, from which the center of mass can be inferred. See the following forum post for more information: OpenFast 2nd order Linearization.
Best regards,
Dear @Jason.Jonkman,
I have been working on looking into the center of mass issue, and on a whim, I tried inverting the initial condition. So the system starts at a pitch of -2 degrees, and it appears that the system will settle at a negative value of a similar magnitude to the positive initial condition. This makes me think that this is not a center of mass issue. What do you think?
Thank you for all of your help up to this point.
Best,
Ryan
Dear @Ryan.Okuda,
Perhaps your model has multiple equilibrium conditions? Can you clarify your model set-up in terms of structural DOFs enabled, whether moorings are enabled/disabled, whether aerodynamics are enabled/disabled, etc.
Best regards,
Dear @Jason.Jonkman,
I ran the case shown in the graph in my last message with elastodyn, servodyn, hydrodyn, and moordyn enabled. I have tried running it without the mooring system, and I get the same results.
Best,
Ryan
Dear @Ryan.Okuda,
I would suggest simplifying the model to debug. Do the results make sense to you if you disable ServoDyn, HydroDyn, and MoorDyn and all structural in ElastoDyn DOFs except platform pitch? Assuming yes, do the results make sense to you if you re-enable only the StCs in ServoDyn? Which feature, when enabled, provides results that you don’t expect?
Best regards,
Hello @Jason.Jonkman,
I was able to diagnose the issue thanks to some of my friends at NREL. It appears that I did not adjust the value of DT_UJac to be 1/10th the natural period of the pitch motion. Once I did that, it fixed the settling issue.
Thank you and your colleagues for providing help on this issue. It looks like after fixing that issue, my results are looking better as well!
Best,
Ryan
1 Like