Dear all,
I am simulating the IEA 15 MW RWT FOWT on the UMaine floater and my goal is to compare it with the Bottom-Fixed counterpart (BF) so as to identify the reasons behind the changes in its power production characteristics. The simulations are done using steady and turbulent wind field, with a turbulence intensity of 10% for all wind speeds between 4 and 24 m/s. In the case of the FOWT, the nacelle fore-aft velocity feedback is on, while the torque controller emoloys the TSR tracking PI control logic.
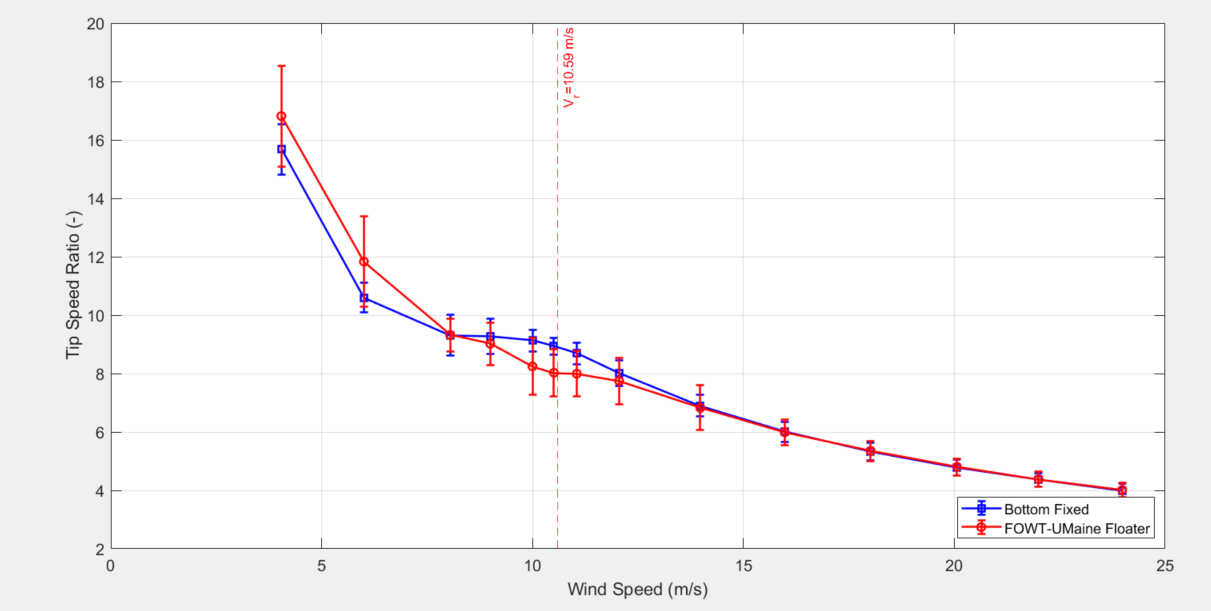
When simulating steady wind conditions, the TSR variation of both configurations is the same up to the peak shaver wind speeds (~9.5 m/s), while the blade pitch angle of the FOWT is lower up to 6 m/s, due to the parallel compensation control term. Up to the peak shaver region, the two configurations have the same blade pitch. As far as the rotational speed is concerned, both WTs have the same variations up to the peak shaver, while between 4 and 6 m/s, the rotor speed is constrained to the minimum rotational speed. The results can be represented in the following three figures.

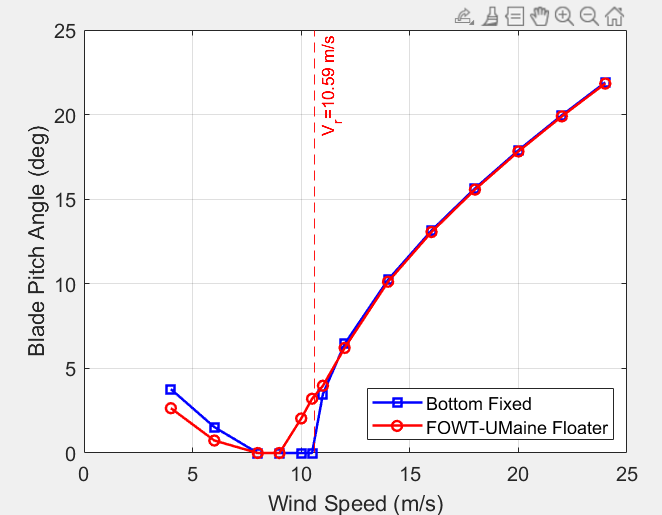

However, I have issues in identifying the motive forces for the turbulent wind results. Firstly, the TSR of the FOWT higher than the BF for the whole 1.5 region (i.e. up to 8 m/s), while nearly equal between 8 and 9 m/s before the peak shaver is enabled, a fact which can be explained by the wind speed variations due to turbulence. For the case of the blade pitch, nearly the same results are obtained with the case of steady wind, with the exception of earlier blade pitching due to the nacelle fore aft velocity which needs to be countered. However, I cannot explain the difference in the rotational speed, which is not equal to the minimum rotational speed of the turbine for wind speeds between 4 and 6 m/s.
Apparently, the tracked TSR changed and, combined with the wind speed variations, the rotational speed has to increase from the rotor rotational speed constraint.


Therefore, my questions are:
1.) How is the generator torque controller TSR reference, determined and why it has changed due to the wind field type change? Since the turbulent wind fields are the same for the two turbines, the TSR reference seems logic to be the same for the FOWT and the BF as in the steady wind case.
2.) It seems rather unusual for the rotational speed to increace in reference to the minimum rotational speed constraint. Is it logical to happen?
3.) Overall, are my results reasonable?
Best regards,
Ioannis Voultsos.






