Dear Jonkman
For the lastest version (v3.4.1), my explanation of the hydrostatic restorating matrix is as follows. Please correct me if something is wrong.

- Buoyancy and rotational buoyancy is considered in
p%F_HS_Moment_Offsetin WAMIT
do iBody = 1, p%NBody
p%F_HS_Moment_Offset(1,iBody) = 0.0_ReKi
p%F_HS_Moment_Offset(2,iBody) = 0.0_ReKi
p%F_HS_Moment_Offset(3,iBody) = InitInp%RhoXg*InitInp%PtfmVol0(iBody)
p%F_HS_Moment_Offset(4,iBody) = InitInp%RhoXg*InitInp%PtfmVol0(iBody)*( InitInp%PtfmCOByt(iBody) - InitInp%PtfmRefyt(iBody) )
p%F_HS_Moment_Offset(5,iBody) = -InitInp%RhoXg*InitInp%PtfmVol0(iBody)*( InitInp%PtfmCOBxt(iBody) - InitInp%PtfmRefxt(iBody) )
p%F_HS_Moment_Offset(6,iBody) = 0.0_ReKi
end do
Part of m·g (steel weight) is subtracted in ElastDyn, and another part (ballast weight) is considered in Morison Strip-Theory.
When VCG is specified as zero in frequency-domin WAMIT, moments caused by weight are considered in corresponding modules. And
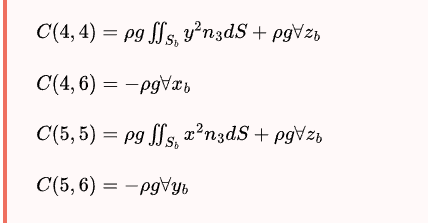 , where C(4,6) and C(5,6) are generally zero.
, where C(4,6) and C(5,6) are generally zero.
- According to Moment of inertia, data interpolation in OpenFast, linear added mass matrix, linear hydrostatic matrix - #2 by Jason.Jonkman, HydroDyn inputs
PtfmRefxt,PtfmRefyt, andPtfmRefztmust be consistent with (0,0,VCG) in frequency-domain WAMIT because hydrostatic restoring matrix, exciting forces and added-mass and damping coefficients are related to (0,0,VCG).
In conjunction with the above discussion,PtfmRefxt,PtfmRefyt, andPtfmRefztare always zero.