Thank you for your reply.
1.My dlc10 settings are as follows:
---------------------- FEATURE SWITCHES AND FLAGS ------------------------------
1 CompElast - Compute structural dynamics (switch) {1=ElastoDyn; 2=ElastoDyn + BeamDyn for blades}
1 CompInflow - Compute inflow wind velocities (switch) {0=still air; 1=InflowWind; 2=external from OpenFOAM}
2 CompAero - Compute aerodynamic loads (switch) {0=None; 1=AeroDyn v14; 2=AeroDyn v15}
1 CompServo - Compute control and electrical-drive dynamics (switch) {0=None; 1=ServoDyn}
1 CompHydro - Compute hydrodynamic loads (switch) {0=None; 1=HydroDyn}
0 CompSub - Compute sub-structural dynamics (switch) {0=None; 1=SubDyn; 2=External Platform MCKF}
3 CompMooring - Compute mooring system (switch) {0=None; 1=MAP++; 2=FEAMooring; 3=MoorDyn; 4=OrcaFlex}
0 CompIce - Compute ice loads (switch) {0=None; 1=IceFloe; 2=IceDyn}
0 MHK - MHK turbine type (switch) {0=Not an MHK turbine; 1=Fixed MHK turbine; 2=Floating MHK turbine}
---------------------- DEGREES OF FREEDOM --------------------------------------
True FlapDOF1 - First flapwise blade mode DOF (flag)
True FlapDOF2 - Second flapwise blade mode DOF (flag)
True EdgeDOF - First edgewise blade mode DOF (flag)
False TeetDOF - Rotor-teeter DOF (flag) [unused for 3 blades]
False DrTrDOF - Drivetrain rotational-flexibility DOF (flag)
False GenDOF - Generator DOF (flag)
False YawDOF - Yaw DOF (flag)
True TwFADOF1 - First fore-aft tower bending-mode DOF (flag)
True TwFADOF2 - Second fore-aft tower bending-mode DOF (flag)
True TwSSDOF1 - First side-to-side tower bending-mode DOF (flag)
True TwSSDOF2 - Second side-to-side tower bending-mode DOF (flag)
True PtfmSgDOF - Platform horizontal surge translation DOF (flag)
True PtfmSwDOF - Platform horizontal sway translation DOF (flag)
True PtfmHvDOF - Platform vertical heave translation DOF (flag)
True PtfmRDOF - Platform roll tilt rotation DOF (flag)
True PtfmPDOF - Platform pitch tilt rotation DOF (flag)
True PtfmYDOF - Platform yaw rotation DOF (flag)
---------------------- INITIAL CONDITIONS --------------------------------------
0 OoPDefl - Initial out-of-plane blade-tip displacement (meters)
0 IPDefl - Initial in-plane blade-tip deflection (meters)
90 BlPitch(1) - Blade 1 initial pitch (degrees)
90 BlPitch(2) - Blade 2 initial pitch (degrees)
90 BlPitch(3) - Blade 3 initial pitch (degrees) [unused for 2 blades]
0 TeetDefl - Initial or fixed teeter angle (degrees) [unused for 3 blades]
0 Azimuth - Initial azimuth angle for blade 1 (degrees)
0 RotSpeed - Initial or fixed rotor speed (rpm)
0 NacYaw - Initial or fixed nacelle-yaw angle (degrees)
---------------------- PITCH CONTROL -------------------------------------------
0 PCMode - Pitch control mode {0: none, 3: user-defined from routine PitchCntrl, 4: user-defined from Simulink/Labview, 5: user-defined from Bladed-style DLL} (switch)
0.0 TPCOn - Time to enable active pitch control (s) [unused when PCMode=0]
---------------------- GENERATOR AND TORQUE CONTROL ----------------------------
0 VSContrl - Variable-speed control mode {0: none, 1: simple VS, 3: user-defined from routine UserVSCont, 4: user-defined from Simulink/Labview, 5: user-defined from Bladed-style DLL} (switch)
1 GenModel - Generator model {1: simple, 2: Thevenin, 3: user-defined from routine UserGen} (switch) [used only when VSContrl=0]
I will set PCmode to 5 and VScontrol to 5 except for shutdown conditions
====== General Options ============================================================================
False Echo - Echo the input to "<rootname>.AD.ech"? (flag)
default DTAero - Time interval for aerodynamic calculations {or "default"} (s)
0 WakeMod - Type of wake/induction model (switch) {0=none, 1=BEMT, 2=DBEMT, 3=OLAF} [WakeMod cannot be 2 or 3 when linearizing]
1 AFAeroMod - Type of blade airfoil aerodynamics model (switch) {1=steady model, 2=Beddoes-Leishman unsteady model} [AFAeroMod must be 1 when linearizing]
Except for shutdown conditions, I will set WakeMod to 1 and AFAeroMod to 2
2.The following figure shows the time-domain diagram of Yaw direction motion on my platform
3.As you can see, I did not encounter any errors while running the DLC10 operating condition. In order to make it clear, I have added NacYaw
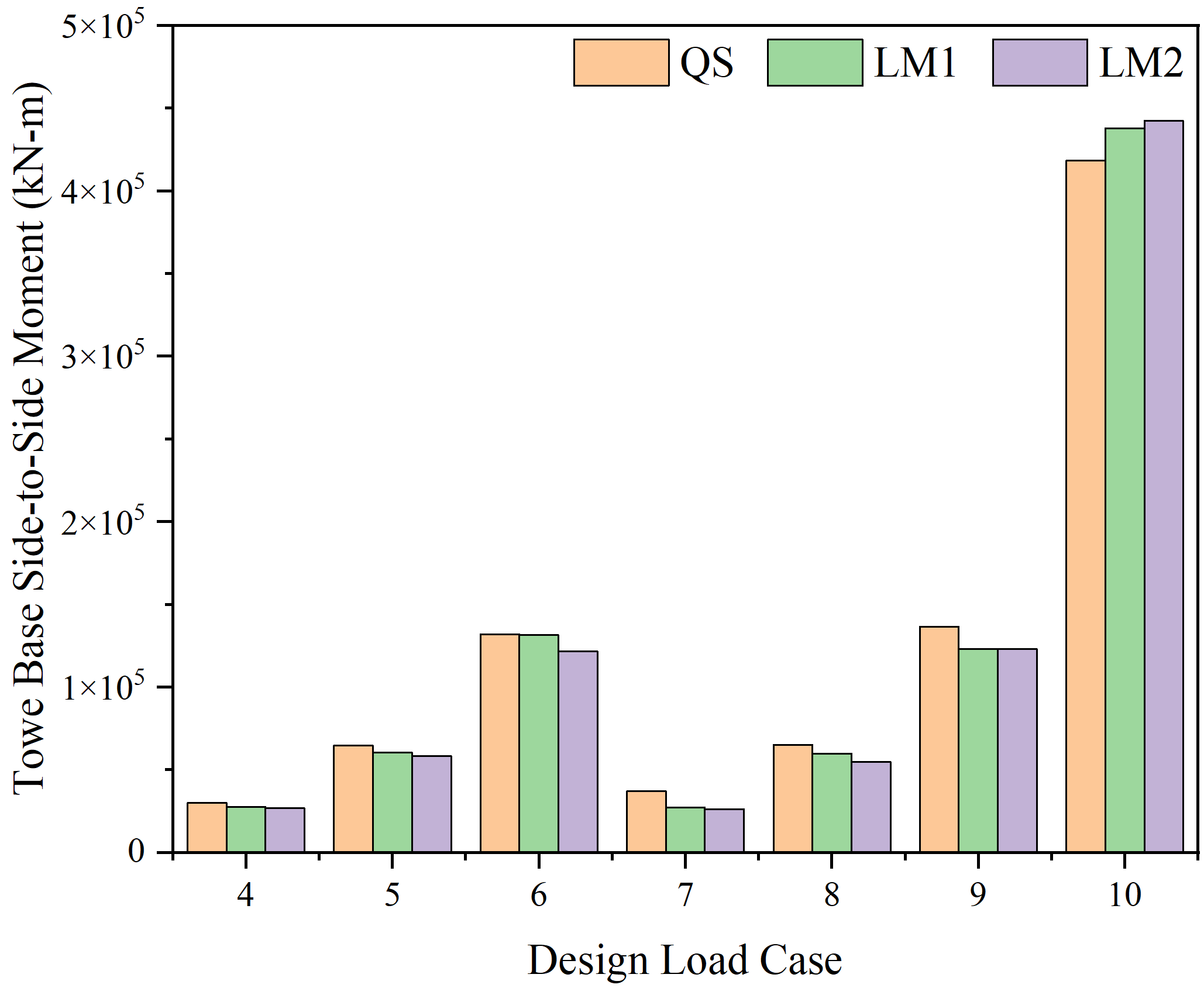
4.My QS refers to the use of MAP++quasi-static, LM1 uses MoorDyn to lumped mass, and LM2 adds Water Kinematics file on the basis of LM1
We look forward to your reply!
Best regards,